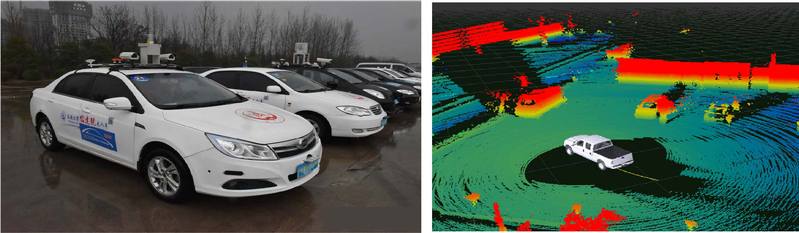
工程中心研究团队根据研究需要自主研发了智能网联汽车与无人驾驶汽车集成平台,并对其通信、定位、环境感知及数据融合等关键技术进行了系统深入研究,以32线旋转激光雷达、毫米波雷达、工业相机、单线激光雷达作为主要感知设备,采用北斗+GPS的双模式的全局定位,结合高精细驾驶地图进行实时路径规划,采用最先进的电控液压相结合的方式对车辆的执行机构部分进行控制。